理解Lambda整定方法推導(dǎo)的內(nèi)容需要掌握拉普拉斯變換和傳遞函數(shù)等控制領(lǐng)域相關(guān)知識(shí),這部分知識(shí)內(nèi)容超過(guò)了本文的范疇,本文直接使用了這些知識(shí)。
Lambda整定方法的推導(dǎo)使用了分析設(shè)計(jì)方法,基于附圖1的簡(jiǎn)化控制框圖。
化的控制框圖")
圖1 簡(jiǎn)化的控制框圖
主通道閉環(huán)傳遞函數(shù)(公式1):
控制器傳遞函數(shù)(公式2):
1、自衡對(duì)象Lambda整定方法推導(dǎo)
被控對(duì)象傳遞函數(shù)(公式3):
閉環(huán)控制不能消除純滯后時(shí)間,所以設(shè)閉環(huán)傳遞函數(shù)仍有不變的純滯后時(shí)間。閉環(huán)時(shí)間常數(shù)λ表示設(shè)定值階躍變化時(shí)過(guò)程的響應(yīng)速度。期望的閉環(huán)傳遞函數(shù)(公式4):
將公式4代入公式2,得公式5和公式6:
將公式3代入公式6,得公式7:
對(duì)公式7中的純滯后時(shí)間使用一階泰勒展開(kāi)近似,得公式8、公式9:


故得公式10:
從正文我們知道,即使被控對(duì)象并不是一階純滯后對(duì)象,仍可以通過(guò)在響應(yīng)曲線中獲得一階純滯后控制模型參數(shù),得到可以實(shí)現(xiàn)穩(wěn)定控制的PID參數(shù),而且λ仍可以反映閉環(huán)控制性能的快慢并遵循λ≥τ。
下面分析λ的選擇原則分析。
使用Lambda整定公式后的閉環(huán)傳遞函數(shù)為公式11:
對(duì)分母純滯后進(jìn)行一階Padé近似得公式12:
閉環(huán)傳遞函數(shù)近似為公式13:

當(dāng)λ=τ,閉環(huán)傳遞函數(shù)為公式14:
典型二階系統(tǒng)為公式15:
不同ξ時(shí)二階系統(tǒng)的階躍響應(yīng)曲線如附圖2所示。公式14對(duì)應(yīng)的參數(shù)得公式16和公式17:
二階系統(tǒng)的階躍響應(yīng)曲線")
圖2 不同ξ時(shí)二階系統(tǒng)的階躍響應(yīng)曲線
所以當(dāng)λ=τ,閉環(huán)的設(shè)定值跟蹤會(huì)發(fā)生超調(diào)。此時(shí)閉環(huán)傳遞函數(shù)并不是期望的一階純滯后響應(yīng),這是純滯后的近似造成的,這也是Lambda整定方法推薦的最強(qiáng)控制作用。同理,當(dāng)λ=2τ時(shí),閉環(huán)設(shè)定值跟蹤不振蕩。
2、積分對(duì)象Lambda整定方法推導(dǎo)
被控對(duì)象可以用積分純滯后對(duì)象描述,傳遞函數(shù)為公式18:
閉環(huán)控制不能消除純滯后時(shí)間,所以設(shè)閉環(huán)傳遞函數(shù)仍有不變的純滯后時(shí)間。閉環(huán)時(shí)間常數(shù)λ表示設(shè)定值階躍變化時(shí)過(guò)程的響應(yīng)速度。期望的閉環(huán)傳遞函數(shù)為公式19:
將閉環(huán)傳遞函數(shù)公式19代入方程式2,得公式20和公式21:
將模型公式18代入公式21,得公式22:
對(duì)純滯后使用一階泰勒展開(kāi)近似,得公式23:
PID控制器傳遞函數(shù)近似為公式24:

對(duì)積分純滯后對(duì)象使用純比例控制就能滿足主通道的控制要求,得公式25:
積分對(duì)象的比例增益計(jì)算公式和自衡對(duì)象類似,λ反映了閉環(huán)控制性能的快慢。λ的選擇依據(jù)和自衡對(duì)象的推導(dǎo)過(guò)程一樣,這里不再贅述。所以也有結(jié)論:當(dāng)λ=τ時(shí),閉環(huán)的設(shè)定值跟蹤會(huì)發(fā)生超調(diào)。這也是Lambda整定方法推薦的最強(qiáng)控制作用。同理當(dāng)λ=2τ時(shí),閉環(huán)設(shè)定值跟蹤不振蕩。
3、積分對(duì)象純比例控制
實(shí)際情況中,干擾可能具有和被控對(duì)象一樣的積分特性。例如水箱或儲(chǔ)罐的進(jìn)出流量對(duì)液位都有積分特性。如圖3所示。
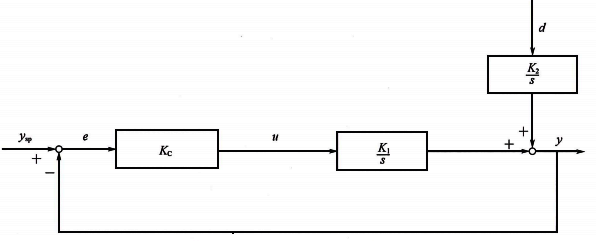
圖3 積分對(duì)象的純比例控制
擾動(dòng)到過(guò)程變量的閉環(huán)傳遞函數(shù)為公式26和公式27:
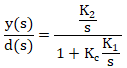
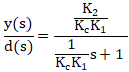
此時(shí)對(duì)純積分對(duì)象的擾動(dòng)通道而言,干擾會(huì)導(dǎo)致系統(tǒng)產(chǎn)生余差。隨著比例作用增強(qiáng),余差逐步減小。
即使被控對(duì)象是積分對(duì)象,考慮到擾動(dòng)的復(fù)雜性,為了消除余差,也推薦使用比例積分控制而不是純比例控制。
關(guān)鍵是積分時(shí)間如何設(shè)置才能既避免振蕩,又能消除余差。當(dāng)然積分時(shí)間太大不會(huì)振蕩,但是消除余差的能力會(huì)比較弱。
4、積分對(duì)象比例積分控制
圖4中針對(duì)積分對(duì)象使用比例積分控制。
象比例積分控制")
圖4 積分對(duì)象比例積分控制
傳遞函數(shù)為公式28~公式30:

閉環(huán)傳遞函數(shù)的兩個(gè)極點(diǎn)位置決定了被控對(duì)象是否振蕩。根據(jù)韋達(dá)定理,極點(diǎn)的位置取決于根的情況由判別式(△=b2-4ac)決定,當(dāng)判別式大于等于0方程式有兩個(gè)實(shí)根時(shí),被控對(duì)象階躍響應(yīng)不振蕩,否則方程式有兩個(gè)共軛虛根,被控對(duì)象階躍響應(yīng)振蕩,得公式31和公式32。
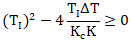

對(duì)純積分對(duì)象而言,當(dāng)使用比例積分控制時(shí),Kc或者TI足夠大使得兩者的乘積大于某個(gè)值,則積分對(duì)象比例積分控制的閉環(huán)系統(tǒng)都不會(huì)振蕩。當(dāng)比例增益減小時(shí),積分時(shí)間要加大才能保證閉環(huán)系統(tǒng)不振蕩,當(dāng)比例增益增加時(shí),積分時(shí)間即使適當(dāng)減小閉環(huán)系統(tǒng)也不會(huì)振蕩。這是積分對(duì)象和自衡對(duì)象的顯著區(qū)別。但是純積分對(duì)象的閉環(huán)響應(yīng)無(wú)論如何都會(huì)出現(xiàn)超調(diào),這個(gè)超調(diào)是由閉環(huán)傳遞函數(shù)的零點(diǎn)造成的。
推薦的不振蕩積分時(shí)間為公式33:
基于上面的分析,積分對(duì)象Lambda整定方法推薦參數(shù)為公式34:

為了克服積分對(duì)象純比例控制有余差而引入積分作用后的Lambda整定方法,是對(duì)理論方法的工程化處理。工程化處理后的積分對(duì)象Lambda整定方法中λ仍然可以反映閉環(huán)響應(yīng)速度,但是實(shí)際的閉環(huán)響應(yīng)就不是期望的一階純滯后響應(yīng),而是始終都有超調(diào)的響應(yīng)。






